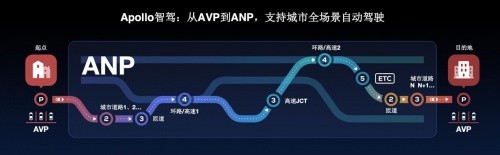
2021年,泛自动驾驶领域风起云涌。无论是完全自动驾驶,还是高级驾驶辅助系统,各类自动驾驶概念一夜之间进入了公众的视野。先进技术在曝光量急速增加的同时,带来了一个重要的新变化:业内热点已从高速公路领航辅助驾驶技术转向城市内领航辅助驾驶。L4+自动驾驶和L2+ADAS系统快速交融,甚至下放并普及在汽车ADAS系统上,让后者的安全性得到了极大提升。这其中的典型代表就是百度的领航辅助系统ANP(Apollo Navigation Pilot)。
在一项针对Apollo ANP的自动驾驶城区实车路测中,装载有整套ANP方案的威马W6接受了一系列在外界看来几乎不可能完成的路跑挑战:在正午商业区、住宿区稠密分布的城市中心道路中,两轮车、行人交错分布,路况错综复杂,测试车辆需要在这种环境下完成全程16公里的开放道路测试,难度不可谓不大。
在环岛测试环节,三个方向的车流在四车道汇聚,稍有不慎就会造成剐蹭。而装载有Apollo ANP的威马W6在实时感知路况的基础上,借助高精地图精确判断了进入环岛的时机,顺利在第一个出口驶出环岛,成功完成了第一项挑战。此外,在行驶中,Apollo ANP还能实时感知绿化带旁的两轮车以及远方的行人,并通过识别信号灯、交通符号辅助决策,对红绿灯进行动态识别提前做出预判减速,真正做到了未雨绸缪。

在路口掉头出测试中,狭小的专用掉头车道以及路口两侧花池,给车辆识别造成了不小的困扰。但装载有Apollo ANP的威马W6还是在这种条件下快速判断出后方跟车及右侧来车,并预判了对方的未来决策状态,轻松完成掉头。

主辅路进出测试对于辅助驾驶车辆而言挑战极大,在其它厂商的路跑测试中发生过多起车祸。这主要缘于车辆需要在狭小空间内转弯的同时,识别专用车道两侧的桩桶,而“桩桶挑战”则是辅助驾驶中鼎鼎有名的“魔鬼”测试,极易出现事故。
在本次路测中,装载有Apollo ANP的威马W6还是完成了自动识别并完美规避桩桶,顺利完成挑战。

面对非机动车、行人与电动车、三轮车随意穿梭的小路场景,Apollo ANP依旧能识别远方横穿马路的行人,实现紧急避让。

值得一提的是,路测中出现了一个处于计划外但在生活中极其常见且非常容易造成事故的场景:前车加塞。行驶中,一辆轿车从前方左侧快速插入车道,在测试车辆不远处行驶。一般而言,这种情景对经验不足的人类司机也具有较高难度。而装载有ANP方案的测试车辆则立即做出了向右侧躲避、并自动完成减速的系列动作,无惊无险地应对了考验,充分验证了ANP方案的高安全性。

在回顾Apollo ANP核心城区路跑的同时,我们不难发现高速领航辅助驾驶与城市领航辅助驾驶的区别:市区道路交通标线复杂、车流密集、交通参与者众多、交通符号多样、场景变化快,极易出现突发情况,留给汽车的决策时间极短,但感知物体的数量级和行为预判的难度却上升到前所未有的层次。可以说,二者虽只有一词只差,但对系统能力的考验却相差了几个维度。而在这种环境下Apollo ANP的表现,无愧是自动驾驶行业辅助驾驶领域的集大成者。
作为L4级自动驾驶技术降维释放到L2级辅助驾驶领域的代表产品,百度Apollo ANP源于百度的纯视觉自动驾驶技术Apollo Lite。该技术不仅可帮助汽车实现自主变道、自主掉头、绕开障碍车等动作,更可有效帮助ADAS系统应对从封闭高速环境进入到开放城区环境后需要应对的高难度预判挑战。是中国泛自动驾驶领域L4+技术下放的代表作。ANP方案仅配备12个摄像头、5个毫米波雷达、以及12个超声波雷达,即可为汽车提供360°无死角、多种传感器类型相互融合的感知方案。这主要源于除去激光雷达后,Apollo ANP的技术研发逻辑、技术方案及运算能力,都与百度Apollo L4级别自动驾驶方案完全一致。Apollo冠绝全球的自动驾驶数据与算法积累,可以无缝转移到搭载有Apollo ANP的汽车之上,可靠性与安全性远超业界。

Apollo ANP助力汽车主机厂商安全开启城市领航辅助驾驶有着充足的底气。截至2021年上半年,百度Apollo自动驾驶测试里程超过1400万公里,地图和道路覆盖领先全国,自动驾驶专利数量超2900件。这些数字不仅是百度Apollo继续开启下一阶段技术跃进的坚实基础,更是将高可靠性与高安全性带给ANP领航辅助系统车主的坚实保障。